王国军,蒋美华,陈 欣,李绍锋
(1.军事交通学院 军用车辆系,天津 300161;2.陆军车船军事代表局驻南京地区军事代表室,南京 210037)
某4×4轻型轮式越野车平顺性多工况脉输入试验研究
王国军1,蒋美华1,陈 欣1,李绍锋2
(1.军事交通学院 军用车辆系,天津 300161;2.陆军车船军事代表局驻南京地区军事代表室,南京 210037)
对国内外车辆平顺性试验评价方法进行了回顾分析,指出了当前我国越野汽车平顺性脉输入试验存在的问题。针对某轻型4×4轮式越野汽车,开展以机动性为评价目标的平顺性脉输入试验,给出了越野车辆平顺性多工况脉输入试验的基本方法。对试验曲线进行拟合,得到了车辆通过不同凸块高度的加速响应变化规律。在此基础上,以人体承受的加速度 24.5 m/s2为限值,得到了车辆通过不同凸块高度允许的最高车速。所取得的试验数据和分析结果为越野车辆平顺性评价提供了重要依据。
轮式车辆;振动加速度;冲击;平顺性;半圆障碍
越野汽车不可避免地要面对各种严酷路况。由地面和车轮的相互作用而产生的振动和冲击会经过悬架的减振和缓冲后传至人体、物资以及设备。研究表明,人体长时间受到振动和冲击,会对脊椎产生不利影响[1]。为了减小来自车辆的振动和冲击,驾驶员会不自觉地降低车速行驶,这也必然降低车辆的机动性。在军用越野车辆设计之前,会提出明确的评价指标,为设计和试验评价提供依据[2]。车辆的平顺性一般通过随机路面和凸起两种工况来进行考核[3]。汽车平顺性脉输入行驶试验主要研究汽车驶过单凸块时的冲击对乘员及货物的影响,评价汽车的平顺性[4]。
美国军用车辆平顺性试验规程(TOP)01-1-014A给出了四项技术用于测量和评价越野车辆的平顺性[5],包括吸收功率技术、ISO 2631—1、ISO 2631—5和半圆障碍(Half-Round Obstacle)技术。其中ISO 2631—1主要针对人体长时间暴露于随机振动环境,以传入人体的振动的加权计算结果为指标,对车辆的平顺性进行测试和评价。吸收功率技术通过测试人体在车辆随机振动条件下吸收的能量来评价车辆的平顺性。ISO 2631—5针对多次冲击(Multiple Shocks)环境条件进行评价。半圆障碍技术用于评价车辆通过单次障碍的平顺性。
长期以来,我国越野汽车平顺性脉输入行驶试验主要采用GB 5902—86[6]所给出的方法进行试验,GB/T 4970—2009[7]沿用了该方法。试验过程中,采用80 mm凸块高度,汽车以不同速度通过凸块,测取驾驶员座椅和座椅底部的底板峰值加速度,将峰值加速度作为指标来评价汽车脉输入平顺性。这一方法主要参照ISO 2631—1[8]制定,适用于民用车辆,但没有考虑越野汽车的特殊性。随着越野汽车研制水平的提高,以及人们对越野汽车机动性的要求越来越高,单一凸块高度的试验方法不足以全面评价车辆通过不同障碍的性能要求,以冲击加速度峰值作为评价指标也不能直接反映人们对车辆机动性评价的需求。
为此,本研究以某轻型4×4轻型轮式越野汽车为试验样车,综合分析国内外先进的平顺性评价方法,制定试验方案,并将试验结果与汽车所能达到的机动性(车速)直接关联。
1 试验方法的确定
GB 5902—86规定,对于越野汽车平顺性脉输入行驶试验,凸块高度要求为80 mm,试验车辆分别以10 km/h、20 km/h、30 km/h、40 km/h、50 km/h、60 km/h的速度通过凸块,加速度传感器要求布置在座椅和座椅底部的底板上,以最大加速度(绝对值)作为评价指标。
美国军用车辆平顺性试验规程(TOP)01-1-014A,对于平顺性脉输入试验提出了如下要求:车辆以不同的速度通过半圆凸块进行冲击试验;试验过程中采集驾驶员座椅底板上的垂直方向加速度,将采集到的试验数据进行低通滤波(采用30 Hz,4阶低通滤波器);针对每个障碍,绘制冲击与车速之间的关系曲线;然后提取冲击峰值及其相应的车速,采用非线性拟合的方法,确定冲击达到24.5 m/s2时的车辆速度,并以这一速度作为车辆平顺性脉输入试验的评价指标。
在美军轻型轮式战术车辆(Light Tactical Vehicle,LTV)的机动性要求中,规定驾驶员座椅垂直方向峰值加速度不超过24.5 m/s2:(1)以45 mph(72 km/h) 的速度通过4 in (102 mm) 高的半圆障碍。(2)以12 mph(20 km/h) 的速度通过8 in (203 mm)高的半圆障碍。(3)以7 mph(11 km/h)的速度通过10 in (254 mm)高的半圆障碍。
对比GB 5902—86和美军对越野车辆脉输入试验的要求,二者的差异主要表现在以下四个方面:一是凸块高度不同,GB 5902—86要求凸块高度为80 mm,而美军要求为三个不同高度,最小值为102 mm,最高值为254 mm。二是工况种类不同,GB 5902—86要求单一凸块高度,美军要求三个凸块高度。三是评价指标不同,GB 5902—86以垂向加速度为评价指标,美军要求以允许通过障碍达到的车速为评价指标。四是加速度测点不同,GB 5902—86要求测点为座椅和座椅底座,美军要求测试座椅底座。
很明显,80 mm高度与越野汽车实际遇到的障碍相比偏低,多种凸块高度更能充分反映越野汽车的使用工况。综合美军相关试验标准[5]以及GB 5902—86,本文提出以下试验方法。
(1)凸块高度:选择102 mm、152 mm、203 mm和254 mm四种高度,进行多工况考核。
(2)试验车速:对应各种凸块高度选择多种车辆速度进行测试,测试车速范围涵盖美军LTV通过凸块的机动性要求车速。
(3)加速度测点:采集驾驶员座椅和座椅底板上的垂直方向加速度。
(4)评价指标:以24.5 m/s2为临界加速度,确定能够通过凸块的最高车速。
2 试验条件、设备及过程
2.1 试验条件
在军事交通学院汽车训练场选择一条1 000 m长的平直路面,在路面上固定不同高度的凸块,路况如图1所示。测试时车辆状况良好。

图1 试验道路与凸块
2.2 试验设备
实车试验所需测试设备见表1,包含7个加速度传感器,一个数据采集分析仪,一套数据采集处理软件和一套GPS。

表1 试验用测试分析设备与用途
2.3 试验过程
首先用涨钉将凸块固定在平直路面上,加速度传感器以粘接方式固定在车辆的座椅底板上,座椅位置则采用坐垫式加速度传感器置于座椅上,人坐在座椅上进行固定。被测车辆分别以不同速度通过每一种指定高度的凸块,具体工况设定见表2。
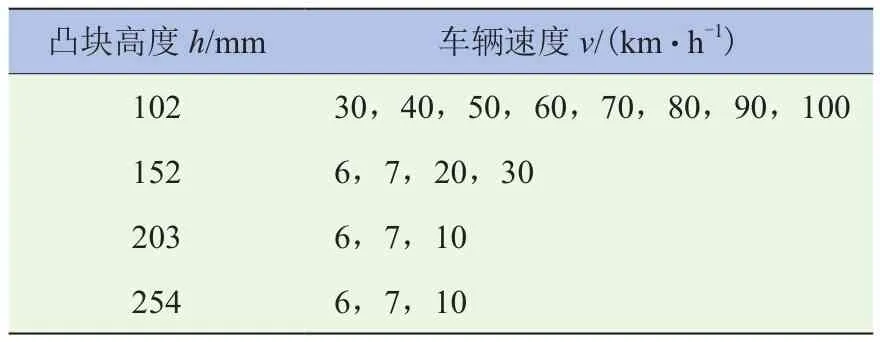
表2 平顺性脉输入试验工况说明
试验过程中,车速由低到高,凸块按照102 mm、152 mm、203 mm和254 mm的高度顺序依次进行试验,试验车速尽量按照表2所示的速度进行控制。在试验过程中发现,当加速度超过一定数值,人体和坐垫式加速度传感器在冲击载荷的作用下跳离座椅平面,测得的加速度不再是传至人体的真实加速度,固定在座椅底座上的加速度传感器测得的数据受外界干扰较少,因此在数据处理过程中以座椅底座上测得的数据为准。
3 数据处理与分析
3.1 数据处理
将采集到的试验数据进行低通滤波(采用30 Hz,4阶低通滤波器)。冲击加速度信号滤波前后如图2所示。
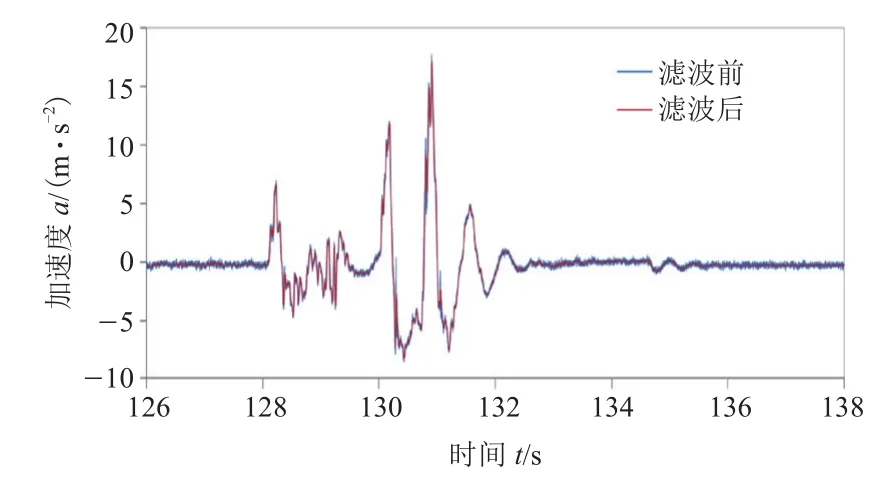
图2 冲击加速度信号滤波前后比较
针对每个障碍,绘制冲击与车速之间的关系曲线。然后提取冲击峰值及其相应的车速,采用非线性拟合的方法,得到冲击峰值与车速之间的关系。
3.2 试验结果与分析
图3是统计得到的峰值加速度随车速的变化关系。可以看出,针对不同的凸块高度,这一关系呈现出明显的非线性特征。对于不同的凸块高度,峰值加速度随车速的变化呈现不同的拟合关系。

图3 驾驶员座椅下底板加速度响应随车速的变化
由图3可知,当凸块高度较低时(对应于车辆通过102 mm高的凸块),轮胎和悬架不易充分发挥其减振缓冲作用;而高速通过时,轮胎和悬架的减振缓冲作用明显。这是由于随着车速的提高,来自路面的冲击脉冲变窄,大部分冲击能量被悬架吸收,从而传至人体的冲击大幅减小,于是产生了所谓的“驼峰”效应。比较图中4条曲线可知,随着凸块升高,“驼峰”效应消失,这也充分体现了进行多工况(设置多个凸块高度)试验的必要性。
将不同测点得到的加速度随车速的变化情况绘制成图4所示的形式,取最严酷的测点。以24.5 m/s2作为限制加速度,求取对应的车速,得到不同凸块高度对应的限制车速。
如图4所示,对于254 mm高的凸块,加速度响应与车速的关系为y = -0.053 5x2+0.731 7x -3×10-6,取y =2.5,求得x =6.8 km/h,即对于54 mm高的凸块,车辆限制速度为6.8 km/h。同样求得对应203 mm凸块高度的车辆限制速度为8.5 km/h。
若测点加速度响应都低于24.5 m/s2,应取最高车速,并以符号↑进行标记,表示限制车速要高于所取车速。所以对应152 mm凸块高度的限制车速高于28 km/h,计作↑28 km/h;对应102 mm凸块高度的限制车速高于100 km/h,记作↑100 km/h。
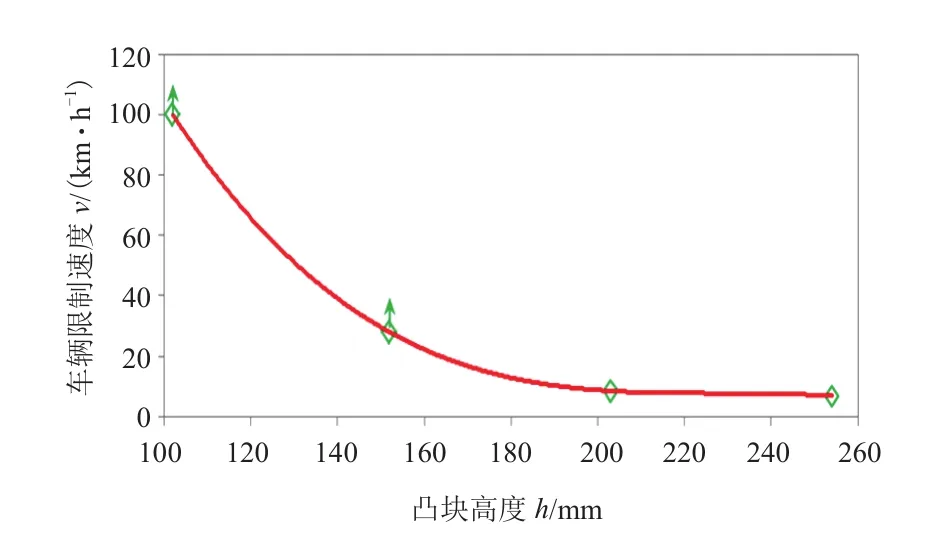
图4 限制车速随凸块高度的变化
4 结论
以某越野汽车为试验样本,开展了多工况平顺性(冲击)试验。该试验是对高机动军用越野车平顺性试验方法、评价指标的突破性探索,获得了宝贵的试验和分析经验。
(1)通过样车的多工况平顺性脉输入试验结果可以看出,设置不同凸块高度,测试不同车速下的响应,能够更全面地评价越野汽车的平顺性。
(2)在试验实施过程中,发现布置在座椅上的加速度传感器容易随着人体受到的冲击与座椅表面脱离,影响试验数据的稳定性,所以应以座椅基座(车底板)上的试验数据作为主要参考依据。
(3)对于平顺性脉输入试验,车辆座椅底板的加速度响应与车速的关系呈现出明显的非线性特征。因此,试验过程中车速工况应该尽可能全面,避免对试验结果进行外插值预测。
(4)为越野汽车平顺性脉输入试验与数据处理提供了具体操作方法,为进一步形成标准的试验流程、试验数据处理方法提供了重要依据。
(
):
[1]ZHAO Xiaojing,SCHINDLER C. Evaluation of Wholebody Vibration Exposure Experienced by Operators of a Compact Wheel Loader According to ISO 2631-1:1997 and ISO 2631-5:2004[J]. International Journal of Industrial Ergonomics,2014,44(6):840-850.
[2]Draft JLTV Purchase Description (PD) Family of Vehicle (Fov)-v2.7 [Z]. 2011.
[3]陈欣,祁涛,李栓成,等.高机动性车辆越野平顺性分析方法研究[J].汽车工程,2008,30(9):736-741. CHEN Xin,QI Tao,LI Shuancheng,et al. A Study on the Analysis Method of the Off-road Ride Comfort of High Mobility Vehicle[J]. Automotive Engineering,2008,30(9):736-741.(in Chinese)
[4]余志生.汽车理论[M].北京:机械工业出版社,2003. YU Zhisheng. Automotive Theory[M]. Beijing:China Machine Press,2003.(in Chinese)
[5]Test Operations Procedure 01-1-014A. Ride Dynamics and Evaluation of Human Exposure to Whole-body Vibration[Z]. 2011.
[6]GB 5902—86.汽车平顺性脉输入行驶试验方法 [S]. 北京:中国标准出版社,1987. GB 5902—86. Method of Pulse Input Running Test—Automobile Ride Comfort [S]. Beijing:China Standard Press,1987.(in Chinese)
[7]GB/T 4970—2009.汽车平顺性试验方法 [S]. 北京:中国标准出版社,2010. GB/T 4970—2009. Method of Running Test—Automotive Ride Comfort[S]. Beijing:China Standard Press, 2010.(in Chinese)
[8]ISO 2631—1:1997.International Standards Organization. Mechanical Vibration and Shock—Evaluation of Human Exposure to Whole-body Vibration—Part 1:General Requirements [S]. Geneva:ISO,1997.
[9]U. S. Army Engineer Waterways Experiment Station. Mobility Assessment of the Roland Wheeled Vehicle System[Z].1982.
[10]ISO 2631—5:2004. Mechanical Vibration and Shock—Evaluation of Human Exposure to Whole-body Vibration—Part 5:Method for Evaluation of Vibration Containing Multiple Shocks [S]. Geneva:ISO,2004.
作者介绍
Ride Quality Test for a 4×4 Cross-Country Vehicle with Multi-pulse inputs
WANG Guojun1, JIANG Meihua1,CHEN Xin1,LI Shaofeng2
(1. Automobile Engineering Department,Military Transportation University,Tianjin 300161,China;2. Military Representative Office in Nanjing,Military Representative Bureau of the Army,Nanjing 210037, China)
The test methods of ride quality were reviewed. The defects of ride quality testing with impulse inputs in China were pointed out. To evaluate the cross-country vehicle more completely and scientifically, the ride quality test for a 4×4 cross-country vehicle was performed and the results were obtained including the maneuverability evaluation. The test procedure was described in detail in the paper. The test data was processed and the relationships between the acceleration responses and different heights of obstacles were determined. Based on the relationships above, the maximum speed that allows the vehicle to pass the obstacle with a given height was calculated, which is one of the most important values for ride comfort evaluation.
wheeled vehicle; vibration acceleration; shock; ride comfort; half-round obstacle

责任作者:王国军(1975-),男,辽宁朝阳人。博士,副教授,主要从事车辆动力学、结构强度研究。Tel:13821611570E-mail:wguojun@yeah.net
U467.1+1
A
10.3969/j.issn.2095-1469.2017.01.09
陈欣(1957-),男,天津人。博士,教授,主要从事车辆设计与性能研究。 Tel:13803068288 E-mail:cxjmhcng@163.com
2016-07-18 改稿日期:2016-10-08
军队项目(CJJ12J012)
用格式:
王国军,蒋美华,陈欣,等. 某4×4轻型轮式越野车平顺性多工况脉输入试验研究[J]. 汽车工程学报,2017,7(1):061-065.
WANG Guojun,JIANG Meihua,CHEN Xin,et al. Ride Quality Test for a 4×4 Cross-Country Vehicle with Multi-pulse Inputs [J]. Chinese Journal of Automotive Engineering,2017,7(1):061-065. (in Chinese)



